Hierzu benötigt man zunächst einen Einblick in den prinzipiellen Aufbau der Schenkelpol-Synchronmaschine. Wie die Vollpolmaschine trägt auch der Stator der Schenkelpolmaschine eine Drehstromwicklung. Der Läufer dagegen hat ausgeprägte Pole. Die Pole werden massiv oder geblecht ausgeführt.
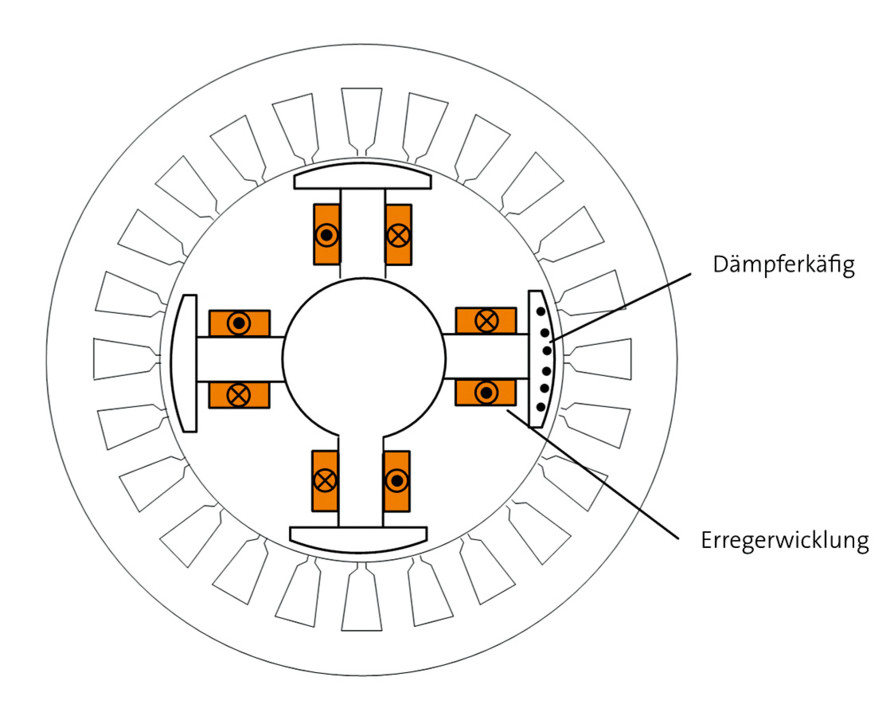
Auf Grund der mechanischen Asymmetrie eignet sich die Schenkelpolmaschine nur für langsam laufende Generatoren. Wird die Schenkelpolmaschine am »starren« Netz betrieben, trägt das Polrad in der Regel neben der Erregerwicklung noch einen Dämpferkäfig (Bild 33). Der Dämpferkäfig ist nur im dynamischen Belastungsfall wirksam. Die bei einer Flussänderung induzierte Spannung im Dämpferkäfig führt zu einem zusätzlichen »asynchronen« Drehmoment, das zur Stabilisierung des Antriebs beiträgt.
Je nach Anwendung wird der Dämpferkäfig auch als Anlaufkäfig ausgeführt, d.h. während des Hochlaufs der Synchronmaschine wird die Erregerwicklung kurzgeschlossen und die Maschine läuft als »Asynchronmaschine« an. Erst in der Nähe der Synchrondrehzahl wird die Erregung zugeschaltet und die Synchronmaschine synchronisiert auf die Synchrondrehzahl.
Unterschied zur Vollpolmaschine
Der Unterschied zwischen der Schenkelpolmaschine und der Vollpolmaschine liegt in der Form des Polrads. Es wird zwischen der Längsachse (d-Achse) in Richtung des Erregerfeldes und der Querachse (q-Achse) senkrecht zum Erregerfeld unterschieden (Bild 34).
Prinzipiell verläuft die Induktivität proportional zum Kehrwert des Luftspaltes δ:

(1)
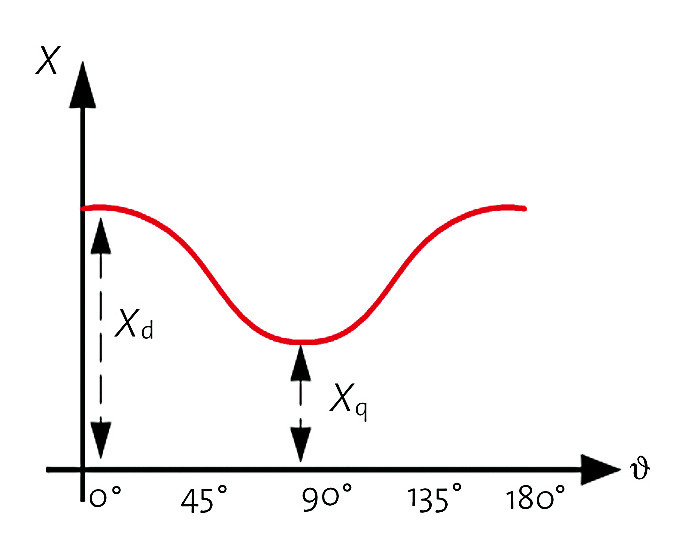
In Bild 34 ist zu erkennen, dass der Luftspalt und somit der magnetische Leitwert bzw. die Induktivität in der d- und q-Achse unterschiedlich sind. Das Verhältnis der Hauptreaktanzen in Längs- und Querrichtung hängt von der Polradgeometrie ab. In Abhängigkeit von der Polradstellung lässt sich die in Bild 35 dargestellte Reaktanz in die beiden Reaktanzen Xd und Xq zerlegen.
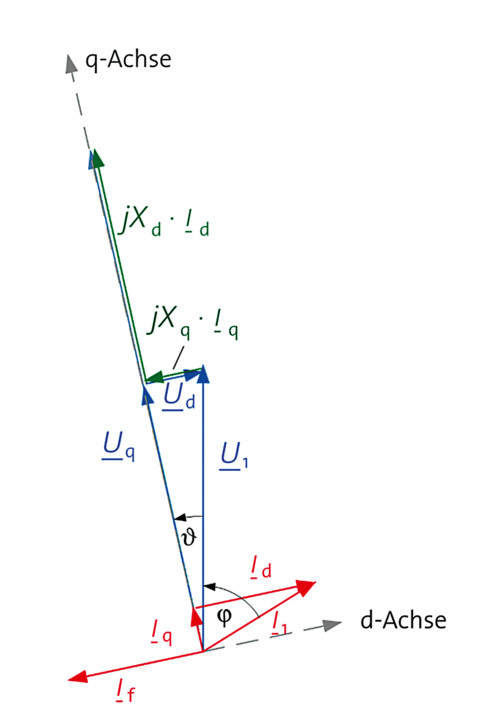
Zeigerdiagramm der Schenkelpolmaschine
Durch die Unterscheidung der d- von der q-Achse ergibt sich ein differenzierteres Zeigerdiagramm. Eine einfache Konstruktion des Zeigerdiagramms in Analogie zur Vollpolmaschine ist nur eingeschränkt möglich. Die Spannungsabfälle werden ebenfalls den beiden orthogonalen Achsen zugeordnet. In Bild 36 ist das Zeigerdiagramm der Schenkelpolmaschine abgebildet.
Reluktanzmoment
Basierend auf den unterschiedlichen magnetischen Leitwerten in Längs- und Querrichtung entwickelt die unerregte Synchronmaschine das sogenannte Reluktanzmoment.
(2)
Das Reluktanzmoment entsteht durch die Ausrichtwirkung eines Eisenkörpers in einem Magnetfeld. Befindet sich ein länglicher, rotierend gelagerter Eisenkörper in einem Magnetfeld, so wird er sich immer in Richtung der kürzesten Feldlinienverbindung zwischen Ständer und Läufer ausrichten. Rotiert das angelegte Magnetfeld wie bei der Synchronmaschine, wird der unerregte Läufer dem rotierenden Ständerfeld auf Grund des Reluktanzmoments folgen. Da sich die magnetischen Verhältnisse nach 180° wiederholen, ändert sich das Reluktanzmoment mit dem doppelten Polradwinkel. Das synchrone Drehmoment (Teil 3, Gl. 15) lautet:
(3)
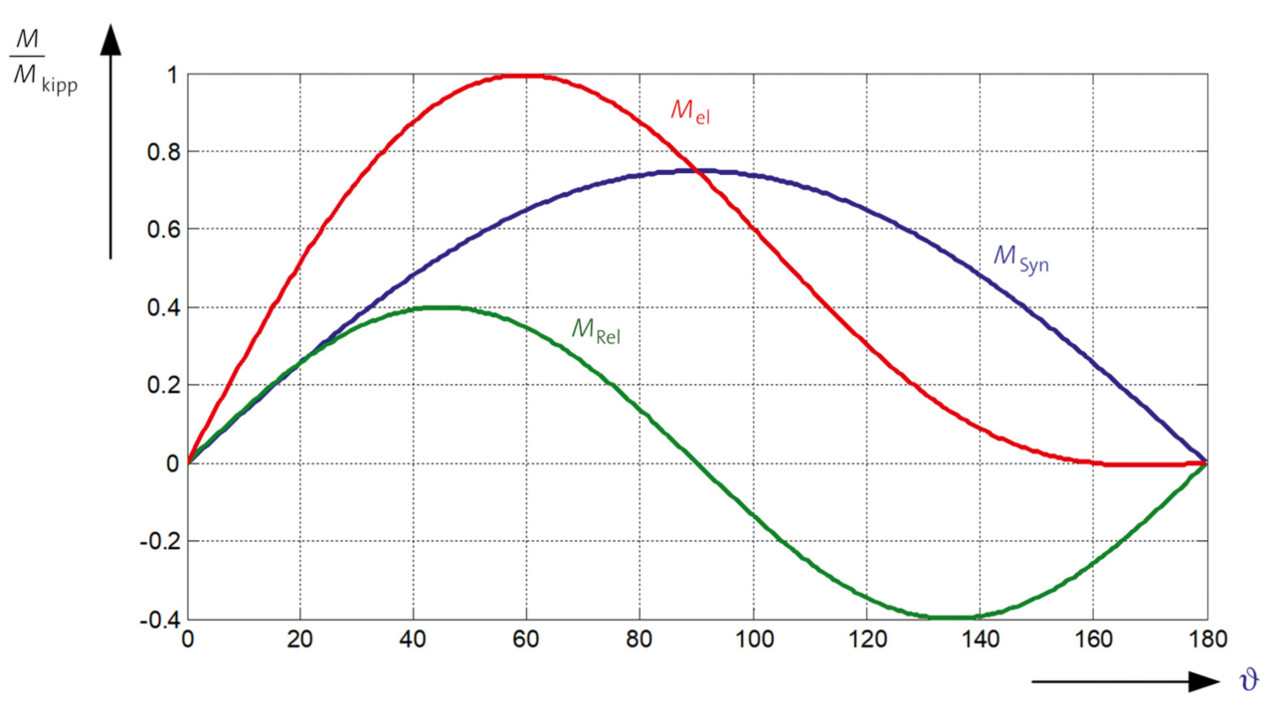
Für das Gesamtmoment der Schenkelpolmaschine ergibt sich die Überlagerung der beiden Drehmomente:
(4)
Das Drehmomentverhalten als Funktion des Polradwinkels der Schenkelpolmaschine ist in Bild 37 dargestellt. Das Maximum des Reluktanzmoments liegt bei 45°. Somit ist der Polradwinkel des Maximums für das gesamte Drehmoment vom Maximum des Reluktanzmoments abhängig. Das maximale Drehmoment ergibt sich folglich nicht bei einem Polradwinkel von 90 °, sondern früher – bei einem Polradwinkel zwischen 45 ° und 90 °.
Mit diesem kurzen Einblick in die Besonderheiten der Schenkelpol-Synchronmaschine wird die Beitragsreihe zur Synchronmaschine abgeschlossen.
Weiterführende Literatur
Für weitere Informationen wird auf die folgenden Literaturstellen hingewiesen:
- Fischer, Rolf; Elektrische Maschinen; 15 Auflage; Hanser Verlag 2011
- Müller, Germar; Ponick, Bernd; 10. Auflage; Grundlagen elektrische Maschinen 1; WILEY-VCH Verlag 2014
- Hoffmann, Wilfried; Elektrische Maschinen; 3 Auflage; Pearson Verlag 2017.
(Ende der Beitragsreihe)
Sollte es Probleme mit dem Download geben oder sollten Links nicht funktionieren, wenden Sie sich bitte an kontakt@elektro.net





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}