Fortsetzung des Beitrags aus ema 6/2013

b1) Durch die angelegte Gleichspannung UBatt, die sich sehr genau einstellen und messen läßt.
b2) Durch die Drehzahl n, die sich ebenfalls praktisch fehlerlos messen läßt.
b3) Durch die Basiselemente des Motors, wie sie im [Technischen Bericht 3 vom gleichen Autor] beschrieben worden sind. Diese sind die Strangwiderstände, Stranginduktivitäten und der symmetrische Verlauf der stranginduzierten Spannung. Alle drei Basiselemente lassen sich durch verkettete Messungen von den drei Motorzuleitungen (inklusive ihres Zuleitungswiderstandes) her genügend genau bestimmen. Weiterhin lassen sich diese dann je nach der Schaltungsart einfach in die jeweiligen Stranggrößen umgerechnen.
Es bleiben also noch genau zwei Unbekannte übrig:
- Das sind der bereits erwähnte Permanentmagnetreduktionsfaktor FRed [-], der bezogen auf die Statorwicklungstemperatur und für Temperaturen > 25 °C stets kleiner als 1 sein muss,
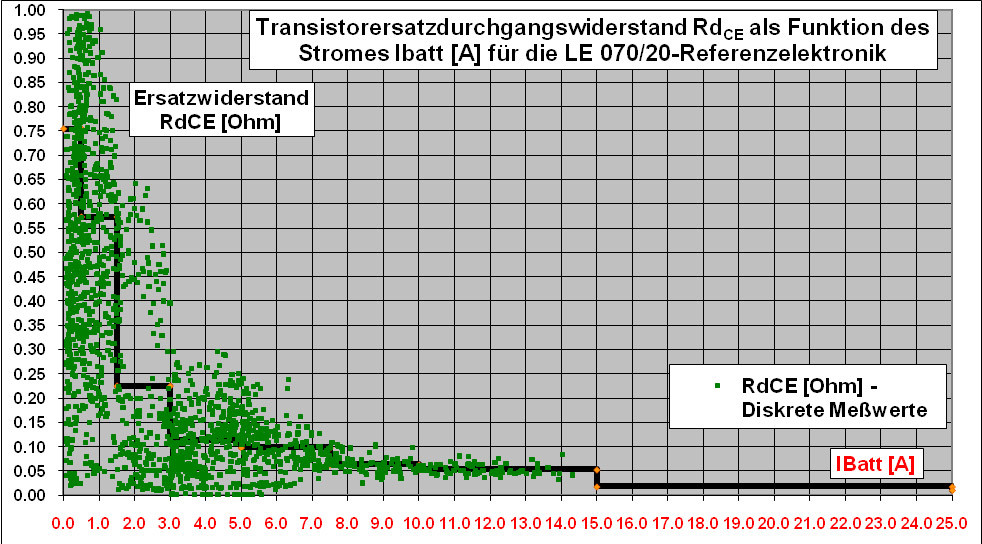
- und der Transistorersatzdurchgangswiderstand RdCE [Ohm] pro Transistor. Dieser muss wegen der zusätzlichen Schaltelemente der Leistungselektronik stets größer als der reine Transistordurchgangswiderstand der verwendeten Leistungsschalttransistoren sein. Und diese beiden Unbekannten sind unter den angegebenen Voraussetzungen aus genau zwei Bedingungen, die durch Messung und anschließende Rechnung zu ermitteln sind, weil gelten muss, dass der berechnete Elektronikeingangsgleichstrom IBatt gleich dem gemessenen ist und das berechnete Wellenmoment Mab gleich dem Mittelwert aus Motorabgabe- und Generatorantriebsmoment ist. Für letztere gilt - bedingt durch die Kupplung zwischen beiden Wellenenden - dass sie im Idealfall gleich sind oder sich nur unwesentlich unterscheiden. Bei sauberer Berechnung des zu einem Arbeitspunkt gehörenden Motor- und Generatormoments liegen beide um weniger als 5 % auseinander. Natürlich könnte man alle leistungsrelevanten - also ohne Berücksichtigung der signalrelevanten - Elemente der Motorelektronik auch in das gezeigte elektrische Ersatzschaltbild mit aufnehmen. Jedoch wird der Rechenaufwand höher durch die größere Anzahl der Maschen Dadurch steigt die Rechengenauigkeit zwar theoretisch an, in der Praxis jedoch nicht, weil das Temperaturverhalten unter Strom von Kontaktflächen, Leiterbahnen und sonstigen halbleitenden Elementen nur schwer zu modellieren ist. Dieser Aufwand lohnt deswegen auch nicht, weil man grundsätzlich eine verlustarme Leistungselektronik anstrebt, deren auf einen Schalttransistor bezogener Gesamtwiderstand möglichst klein, in der Realität aber wegen der Leistungsanpassung möglichst sehr viel kleiner als der verkettete Wicklungswarmwiderstand sein soll. Daher reduzieren wir die Leistungselektronik in üblicher sechspulsiger H-Schaltung zwischen ihren Eingangs- und Ausgangsklemmen in zwei - für je einen gleichzeitig stromdurchflossenen Ober- und Untertransistor - Transistorersatzdurchgangswiderstände RdCE [Ohm]. In denen denken wir uns die gesamten elektronikinternenen Verluste vereinigt, die zwischen den Eingangsklemmen zum Netzteil hin und den dreiphasigen Ausgangszuleitungen zum Motorstecker auftreten.

Man kann grob drei Bereiche unterscheiden:
- Der Bereich zwischen ca. 8 A und ca. 15 A, in dem die RdCE-Werte recht dicht beieinander liegen.
- Der Bereich zwischen ca. 2 A und ca. 8 A, in dem die RdCE-Werte eine große Bereichsstreuung aufweisen.
- Der Bereich zwischen > 0 A und ca. 2 A, in dem die RdCE-Werte steil anzusteigen scheinen.
Dazu unterteilt man den Strombereich in Abschnitte, z. B. 0 bis 0,5 A , 0,5 bis 1,5 A , 1,5 bis 3 A , 3 bis 5 A , 5 bis 7,5 A , 7,5 bis 10 A , 10 bis 15 A , 15 bis 25 A , und trägt in jeden Stromabbschnittsbereich den nach eine neuer Messserie aktualisierten Mittelwert der RdCE-Widerstände ein, so dass man mit fortschreitender Zeit immer bessere Werte erhält, die zudem durch die Mittelwertbildung fehler- und ausreißerkorrigiert werden. Damit wird einerseits die Summe der wachsenden Erfahrungen nach vielen Messungen nachgebildet, und andererseits kann diese Treppenkurve als Polygonzug jede beliebige Kurvenform über dem Strom IBatt (hier: von Null bis 25 A) annehmen, von der man am Anfang noch gar nicht weiß, wie diese aussehen wird. Voraussetzung ist natürlich, dass alle Messungen an der stets gleichen Versuchselektronik durchgeführt werden. In einem weiteren Schritt kann man dann untersuchen, ob sich für jeden Stromabschnitt für den Ersatzwiderstand RdCE eine weitere Verbesserung ergibt, in dem man diese Werte über der Motordrehzahl (eigentlich der Ankerkreisfrequenz) darstellt, denn die Drehzahl gehört zu den elementaren Größen, die sich bei jedem Prüfstandsversuch neben den Gleichspannungs- und Gleichstromgrößen immer genügend genau messen läßt.
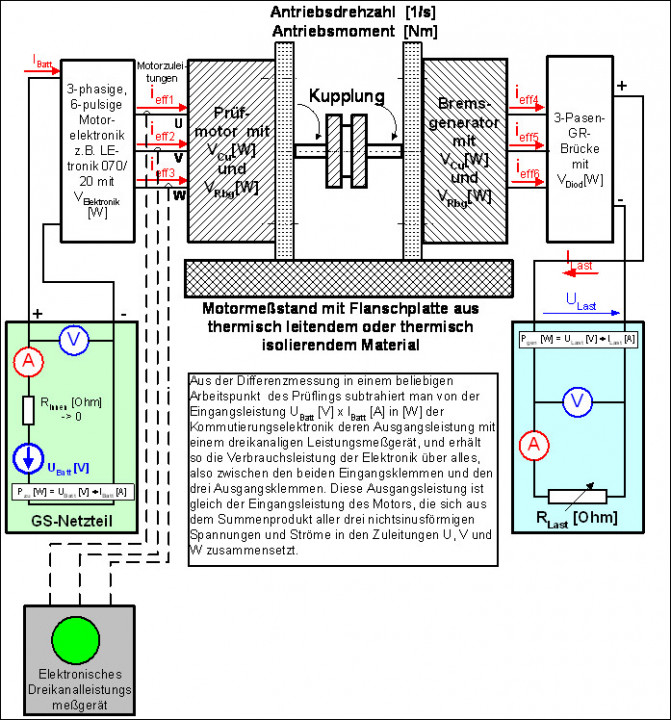
Ein zweites Verfahren besteht darin, aus einer genügend großen Anzahl von Motormessungen an ein und derselben Referenz- oder Labormeßelektronik durch eine Leistungsdifferenzmessung die realen Elektronikverluste zu messen, und diese danach über dem Zwischenkreisstrom IBatt und der auf eine Polzahl (z. B. 2p = 4) bezogenen Motordrehzahl aufzutragen. Hierzu betrachten wir in der folgenden und bereits bekannten Abbildung nur die (linke) Motorseite des Motorversuchsprüfstands:
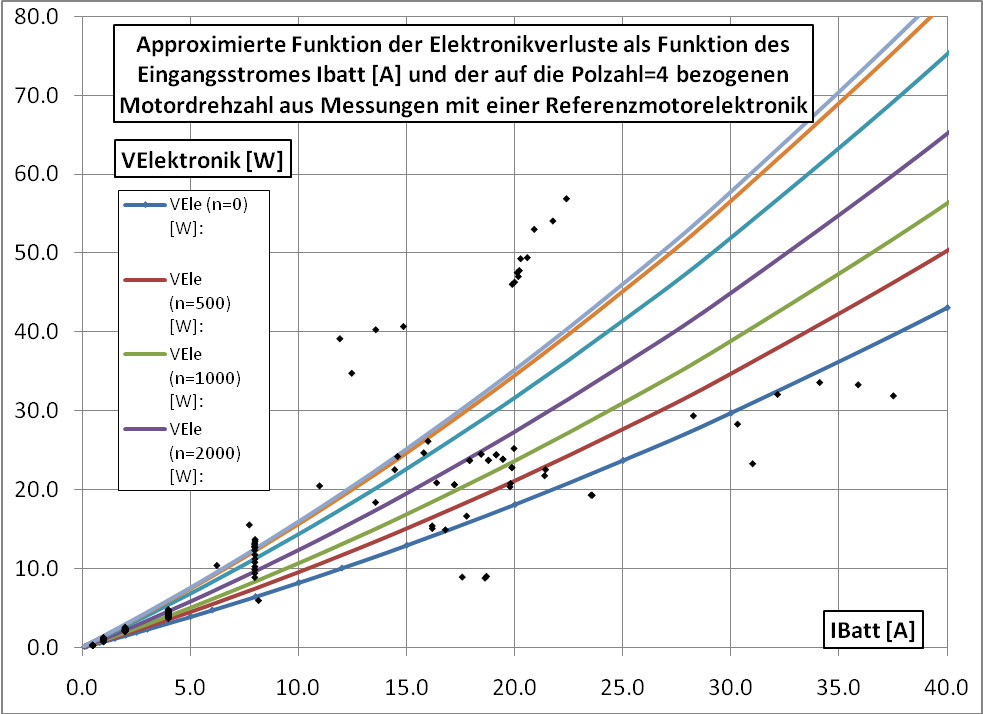
Sammelt man wie oben ausgeführt diese Elektronikverluste über möglichst viele Messungen, so kann man diese in folgender physikalisch sinnvoller Formel 4 darstellen:
Die Funktionskonstante blv hat die Dimension [Ohm], cmv die Dimension [W/A] und dpv wird man am Anfang sinnvollerweise auf den Wert Null [W] setzen, so dass die im folgenden Bild gezeigte Näherungsfunktion im Ursprung beginnt. Die weiteren Konstanten akv und erv sind dimensionslos, und die Drehzahl nmit ergibt sich aus dem Mittelwert aller auf die Polzahl 2p = 4 bezogenen Messdrehzahlen. Damit erhält man für die Motorberechnung einen Elektronikverlustrichtwert als Funktion des Stromes IBatt und der bezogenen Motordrehzahl, an den man sich durch Variieren des Transistorersatzdurchgangswiderstands RdCE beliebig annähern kann. Diese Elektronikverluste sind ebenso wie die Motorverluste als stationäre Verluste zu betrachten. Diese Formel taugt also nicht für die Auswirkungen kurzzeitiger Motorstromspitzen in der Kommutierungselektronik. Die Werte erhält man wiederum nach der bereits bekannten Methode und im [Technischen Bericht 2] vorgestellten Methode der minimalen mittleren quadratischen Abweichung MMQA zu:
- blv = 0,01669 [Ohm]
- cmv = 1,42791 [W/A]
- dpv = 0 [W]
- akv = - 0,48615 [-]
- erv = - 2,57574 [-]
- nmit = 6588,37 [Upm]
nach 126 Messungen. Diese Werte sind noch nicht konvergent. Diese zweidimensionale Näherungsfunktion zeigt das folgende Bild 5, die schwarzen Punkte sind die Messpunkte:
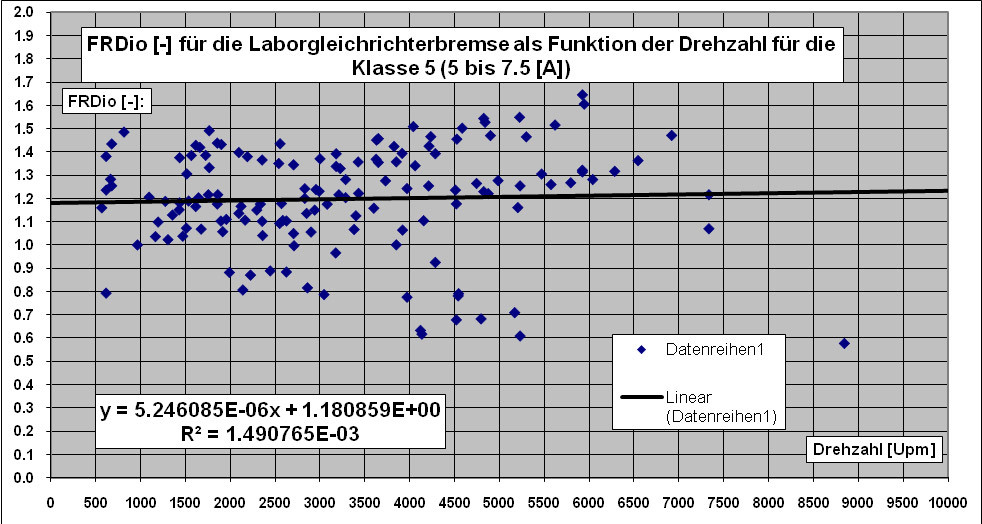
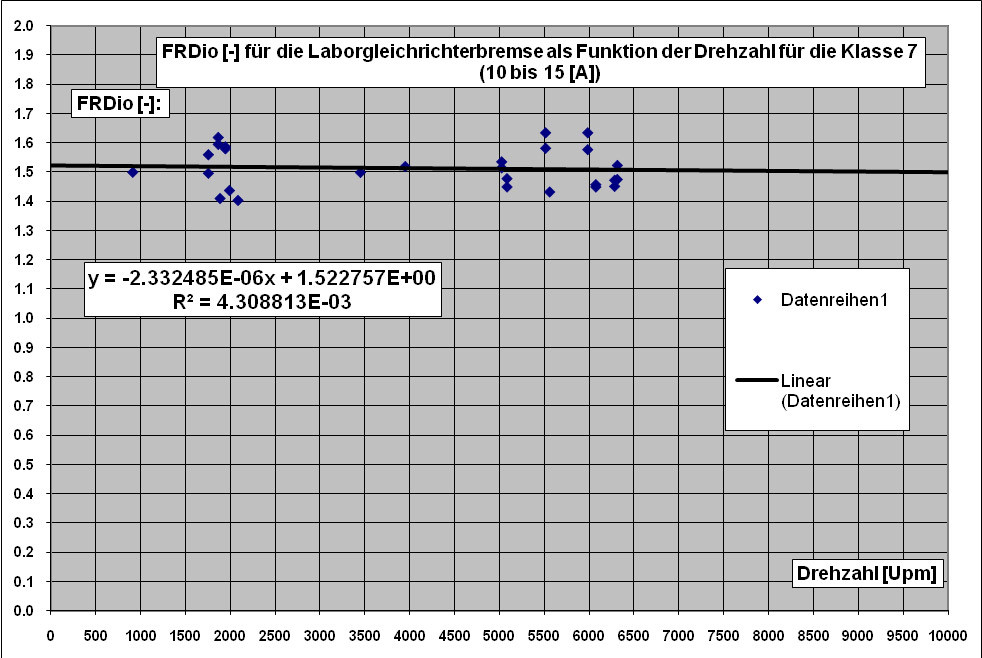
Ermitteln des Gleichrichtzuschlagsfaktors FRDio [-] für die verwendete Laborgleichrichterbremse:
Wie in der obigen Formel 4 bereits aufgezeigt, stelle man sich den Gleichrichtfaktor FRDio [-] als einen Zuschlag vor, mit dem mathematisch der jeweilige stromabhängige Brückengleichrichterdiodendurchgangswiderstand zu multiplizieren ist, so dass in Abstimmung mit dem zugehörigen Magnetreduktionsfaktor FRed [-] des jeweils verwendeten Bremsgenerators auf dem Prüfstand die Bedingung für den gemessenen Laststrom ILast [A] und dem zugeführten Generatorantriebsmoment, welches gleich dem negativen Motorwellenmoment Mab [Nm] ist, erfüllt werden. Dabei sind wiederum die Randbedingungen zu beachten, dass FRed [-] für den betriebswarmen Generator kleiner als 1 sein muss und FRDio um den Wert 1 herum liegen wird, also beispielsweise zwischen ca. 0,7 und 1,3. In den beispielhaft gezeigten Diagrammen, in denen der aus einer Vielzahl von Messungen an derselben Gleichrichterbrücke ermittelte Gleichrichtfaktor FRDio dargestellt ist, sieht man, dass dieser für den Bereich ILast von 3 bis 5 A eine leicht fallende Tendenz hat, für den Bereich 5 bis 7,5 A etwa konstant bleibt und für den Bereich 7,5 bis 10 A eine leicht ansteigende Tendenz hat. Weitere Messungen können diesen Trend noch präzisieren.
Alle drei linearen Näherungsfunktionen sind über dem gängigen Drehzahlbereich von 0 bis 10.000 Upm dargestellt, und diese in Excel ermittelten linearen Funktionen lassen sich dann, nachdem die Funktionskonstanten nach genügend vielen Messungen sich kaum noch ändern, wiederum in ein Berechnungsprogramm einbauen. Dadurch hat man den Gleichrichtfaktor FRDio in Abhängigkeit von den zwei elementar meßbaren Prüfparametern, dem Generatorlaststrom ILast [A] und der gemeinsamen Aggregatdrehzahl n [Upm] dargestellt. Man erkennt, dass man durch dieses Verfahren keinen Drehmomentenmessaufnehmer zwischen Motor und Generator mechanisch zwischenschalten muss, weil dadurch der Bremsgenerator aufgrund seiner bekannten elektrischen Eckdaten und der Messdaten des jeweiligen Lastpunktes über die zugehörige Berechnung selbst zum Drehmomentenmessaufnehmer wird. In der Praxis erreicht man dadurch, dass das motorseitige Abgabemoment, welches man durch Messung und anschließende Auswertungsrechnung auf diese Weise ermittelt hat, sich um weniger als 5 % von dem generatorseitig zugeführten Antriebsmoment unterscheidet, so dass man diese beiden mitteln kann, und dadurch das wahrscheinlich korrekte Moment, welches an der Kupplung angreift, erhält.
Auf der folgenden Seite sind im weiteren noch beispielhaft der FRDio-Verlauf über der Generatordrehzahl und dem Bereich ILast von 5 bis 7,5 A und 7,5 bis 10 A dargestellt. Diese Funktionen sind selbstverständlich unabhängig von dem jeweils verwendeten Prüfgenerator, den man immer so auswählen wird, dass er der Leistungsklasse des Prüfmotors entspricht, also nicht wärmer werden sollte als dieser bei thermisch maximal möglicher Belastung. Bringt man nun den Prüfmotor z. B. thermisch leitend an und den zugehörigen Prüfgenerator thermisch nicht leitend an, so kann man mit einem Versuch gleichzeitig beide Motoren, so sie typengleich sind, auswerten und deren thermische Eckdaten in ein und demselben Versuch durch anschließende Auswertung bestimmen.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}